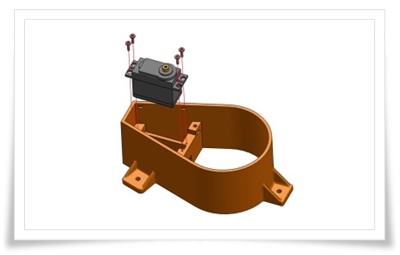
第1步
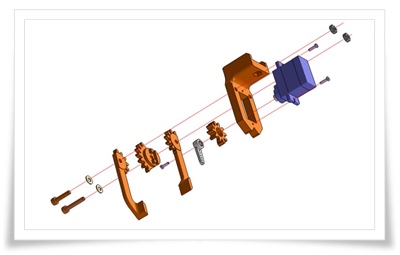
将驱动轴朝前放置946伺服器。

第2步
用随带的自攻螺钉将伺服器固定到主机座上。
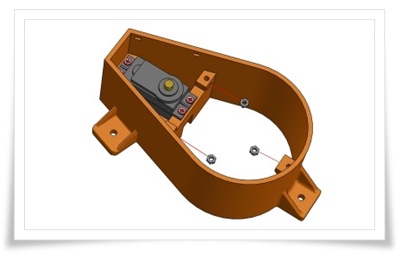
第3步
将3个M3螺母朝下插入主底座的插孔中。
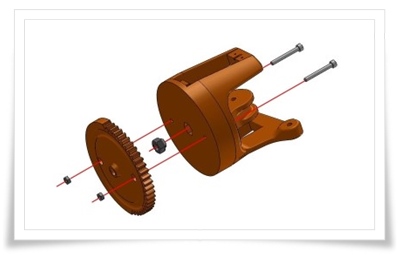
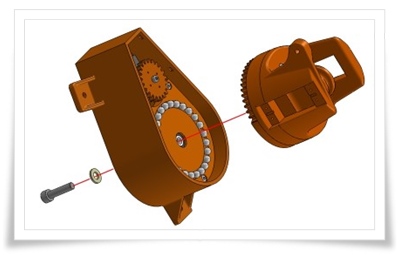
第4步
将606轴承插入其外壳,并使用3个M3螺钉将板连接到主底座。
第5步
检验轴承的运动自由度。
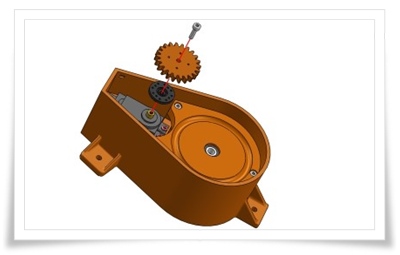
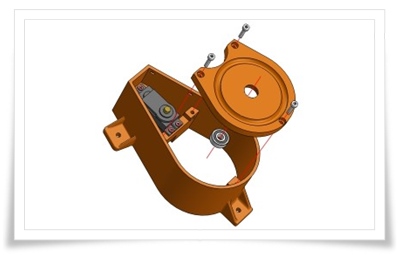
第6步
将驱动板放在花键轴上,并在驱动印刷齿轮上方。
加一或两个小的自攻螺钉以连接板和齿轮
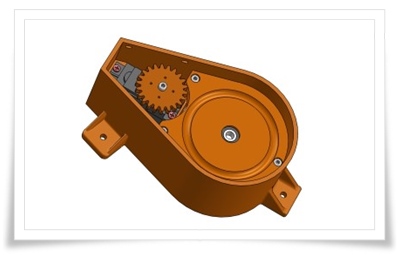
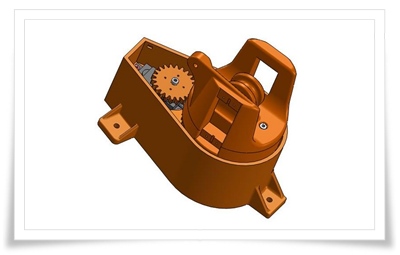
第7步
Thera有两个驱动齿轮,一个有22个theet,另一个有25个,我做了两个,因为在打印基座时我有些变形,并且两个轴的距离变小
第8步
如图所示,将M6自锁螺母插入旋转底座的插孔中,然后将其放置在带齿轮的底座中,并使用一对M3螺钉和螺母将其固定。
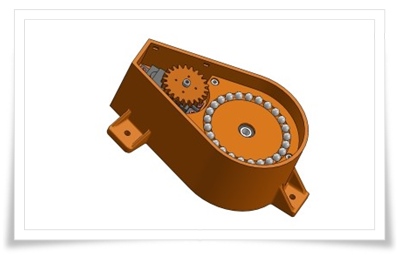
第9步
使用约25个直径为6mm的球体填充路径。
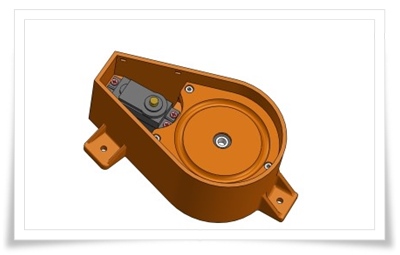
第10步
保持主底座平整,并使其与旋转元件接触,使用M6螺钉连接两个元件。
第11步
现在主要基地已经完成。
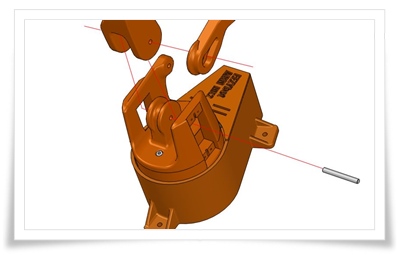
第12步
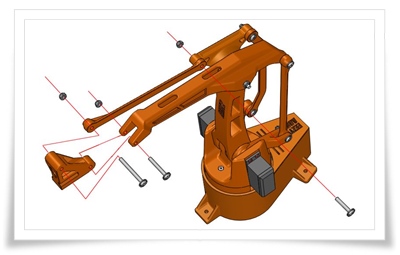
将主臂和垂直驱动杆放在适当的位置,使用33毫米长的4毫米直径杆将它们与主底座水平轴连接。
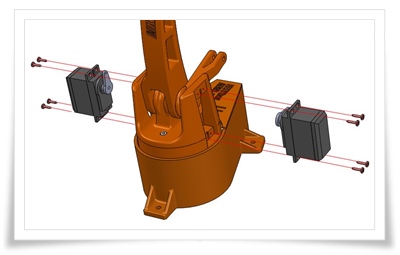
第13步
将两个伺服器固定到位,并使用八个自攻螺钉将其固定到位。要驱动手臂,请使用随伺服器提供的单喇叭。
确保舵机的中间位置与臂的外壳对齐
第14步
将直杆的下端连接到驱动臂。

第15步
将成角度的杠杆的下端连接到基座的固定端。
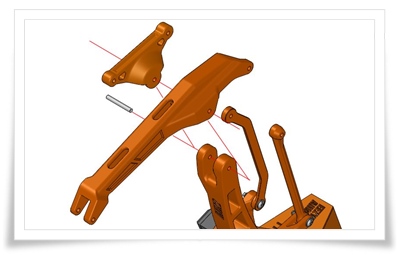
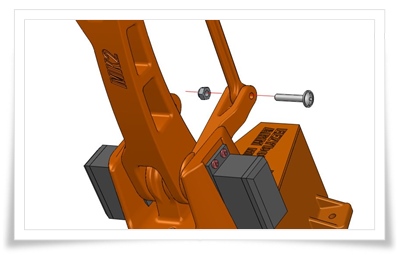
第16步
使用有威胁的M4杆将水平臂和三角形连接到主臂的上部。
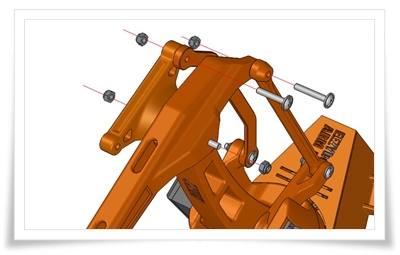
第17步
将直杆连接到主臂并与三角形成角度。
第18步
将杆和爪快速释放装置连接到水平臂的前部。

第19步
现在,机械臂已组装完毕。
现在,您可以继续进行爪组装,也可以使用自己的爪设计
第20步
如图所示组装爪子。
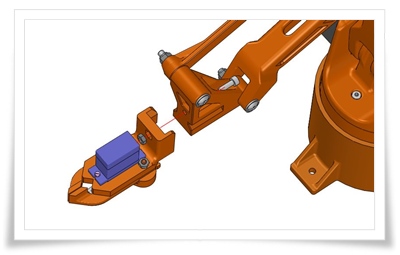
第21步
将爪子连接到手臂的快速释放端。

第22步
eezybotarm mk2现在已机械组装,可以由电子设备驱动。

咨询下是否有材料清单~